在快速變化的機器人和自主系統世界中,有一項技術脫穎而出,改變了遊戲規則:SLAM。想像機器人探索一個陌生的環境,動態地建立地圖,同時確定其在其中的位置。這種感知和映射的複雜舞蹈不僅僅是未來的幻想,而是改變從汽車到醫療保健等行業的現實。讓我們深入了解 3D SLAM 的迷人世界,揭開這項突破性技術背後的複雜性。
什麼是 3D SLAM?
SLAM 代表同步定位和地圖建構技術。 SLAM 最初用於軍事應用,幫助無人機和機器人在複雜環境中執行任務,後來逐漸進入民用領域。如今,3D SLAM 被廣泛應用於家用掃地機器人、自動駕駛汽車等各種應用領域,並顯著提高了這些設備的智慧化程度。
3D SLAM的定義
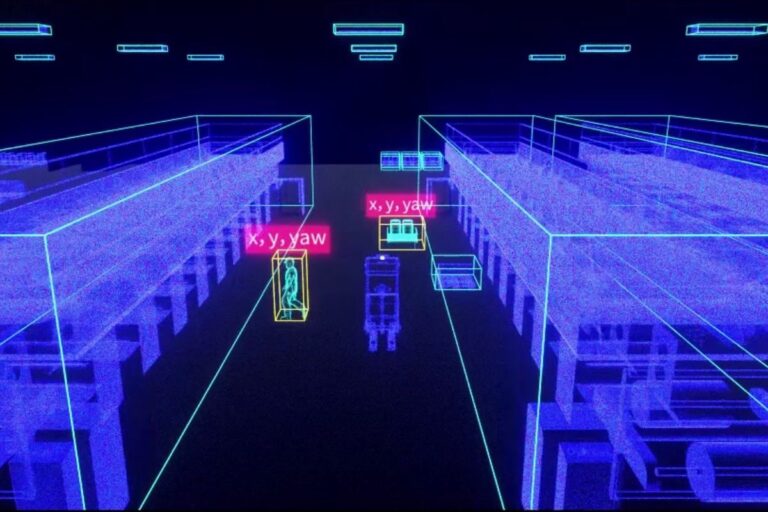
SLAM 使機器人能夠在未知環境中同時進行自我定位和建構地圖。具體來說,SLAM使用深度相機或LiDAR等感測器收集環境數據,利用演算法估計設備的位置,同時建立周圍環境的地圖。這項技術解決瞭如何在不知道區域的情況下繪製環境地圖以及反之亦然的問題。 SLAM 廣泛應用於機器人導航、自動駕駛和擴增實境 (AR) 等領域,讓設備在沒有預定義地圖的情況下導航複雜環境。
3D SLAM 系統通常包括兩個主要模組:前端和後端。前端負責初始資料處理,包括特徵提取、運動估計和資料關聯,而後端則優化這些估計值以提高系統的準確性和穩健性。
根據所使用的感測器,SLAM 可分為視覺 SLAM、LiDAR SLAM 和 慣性測量單元 (IMU) SLAM。視覺 SLAM 使用攝影機捕捉影像訊息,而 LiDAR SLAM 使用雷射掃描儀檢測環境結構,IMU SLAM 使用慣性感測器進行自我定位。
3D SLAM 的關鍵元件
- 感測器:高解析度雷射雷達、深度攝影機和 IMU 對於捕獲精確的空間資料至關重要。
- 演算法:先進的 SLAM 演算法處理感測器資料以創建精確的 3D 地圖並追蹤掃描器的運動。
- 運算能力:需要強大的處理單元來處理 SLAM 所涉及的複雜運算。
為什麼需要3D SLAM導航?
環境意識
透過建構環境地圖,SLAM系統可以辨識障礙物,從而實現有效的避障。
高適應性
SLAM 系統可以適應不同的光照條件、動態環境變化和多樣化的地形,提供穩定的導航能力。
自主導航
SLAM技術允許機器人在沒有外部導航輔助的環境中自主移動,這對於探索未知區域或在沒有GPS訊號的室內導航至關重要。
路徑規劃
準確的環境地圖可協助機器人或車輛規劃有效的路徑,選擇最佳或安全的路線。
在沒有GPS訊號的室內或地下環境中,SLAM導航技術很重要。機器人分析感測器數據來識別環境特徵並利用這些資訊來估計它們的位置。例如,視覺 SLAM 系統使用 2D 或 3D 攝影機捕捉環境影像以及深度數據,然後採用特徵匹配和運動估計演算法來追蹤機器人運動並建立環境地圖。 LiDAR SLAM 系統透過發射雷射光束並分析返回的訊號來感知環境結構。
3D SLAM掃描器可以應用在哪裡?
自動駕駛
SLAM 對於自動駕駛汽車至關重要,因為它能夠實現準確的環境感知和定位,透過整合來自攝影機和雷射雷達感測器的數據,可以在城市街道和高速公路等不同環境中實現穩定導航。
自主移動機器人
在工業領域,移動機器人利用SLAM技術實現自主導航,在倉庫、醫院、商場等室內環境中執行運輸、清潔、監控等任務。
例如, MRDVS Ceiling Vision SLAM解決方案 提供業界領先的機器人精準度和協作能力。此方案僅需機器人走一次路徑,搭載的3D相機自動掃描上方環境,AI演算法快速完成建圖,為移動機器人提供可靠的導航。該技術解決了2D LiDAR在複雜多變的環境中限制。
MRDVS CV SLAM導航
家用吸塵器機器人
家用掃地機器人利用SLAM進行自我定位並建構室內環境地圖。這使得機器人能夠了解其在房間中的位置和周圍環境的佈局。基於SLAM建構的地圖,掃地機器人可以規劃高效率的清掃路徑,確保覆蓋所有需要清掃的區域。 SLAM導航結合感應器,可讓掃地機器人辨識並避開障礙物,防止碰撞,實現更智慧的導航。
使用MRDVS解決方案的3D SLAM產業案例研究
案例研究1
某光伏企業生產車間人員、車流量大,對機台對接精度要求高,採用MRDVS Ceiling Vision SLAM Scanner方案取代傳統2D LiDAR導航。該公司將MRDVS SLAM導航系統應用於光伏一體化搬運機器人上,系統已穩定運作一年多。在兩個車間佔地 80,000 平方米的場地上,超過 500 輛配備該視覺 SLAM 模組的自動導引車 (AGV) 一直運行,沒有故障或丟失定位的問題。

案例研究2
某國內領先的新能源公司,車間環境開放式,人車混行,零件倉儲差異較大,採用了MRDVS 3D SLAM導航系統。該系統安裝在負責運輸車輛引擎的大型捲裝 AGV 上。


案例研究3
某知名服裝公司擁有寬敞的倉庫,超過4,000個儲存位置,重大物料變化採用了MRDVS Ceiling Vision SLAM導航解決方案。此導航系統安裝在自動堆高機機器人上,負責運送托盤。

結語
3D SLAM 現在對於自動駕駛汽車和家用機器人等民用應用至關重要。它可以使用深度攝影機和雷射雷達感測器同時進行導航和繪圖。 SLAM 對於沒有 GPS 的區域中的自主導航至關重要,它允許機器人建立地圖、識別障礙物並規劃有效路徑。
MRDVS 3D SLAM 掃描器導航解決方案利用獨家 天花板視覺 技術,適用於各種工廠環境,包括高度從 2到12米 並且適合 狹窄的通道。該解決方案建立了針對工業應用的深度學習網絡,並透過大量的工業場景資料進行訓練,以在不同的工作環境中提供強大的目標檢測效能。
常見問題
我可以在哪裡應用 MRDVS Ceiling Vision SLAM?
MRDVS Ceiling Vision SLAM系統可應用於SMT上下料機器人、堆高機、清潔機器人等,該系統適用於多種車型。
MRDVS CV 感測器的最大偵測範圍是多少?
方案中產品適用於層高2-12m的廠房。它們也適用於狹長的通道。
MRDVS CV 感測器的精度如何?
MRDVS感測器的精度可達1厘米,具體精度根據所用相機的類型而有所不同。
使用 MRDVS 3D SLAM 相機有哪些好處?
MRDVS 3D SLAM 相機使用高解析度 RGB-D 相機捕捉天花板的特徵。 MRDVS CV SLAM 系統使用深度學習和分割技術來準確導航不斷變化的環境。該方案透過對關鍵工業場景目標的高精度識別與跟踪,實現準確可靠的自主定位。


