Early mobile robot systems relied heavily on fixed markers like QR codes or magnetic strips to navigate. These systems were effective in static environments such as warehouses but had significant limitations.
Dependence on pre-installed markers, vulnerability to disruptions from marker damage or displacement, and an inability to adapt to dynamic changes in the environment highlighted their drawbacks. In contrast, markerless navigation, enabled by SLAM technology, has revolutionized how robots operate.
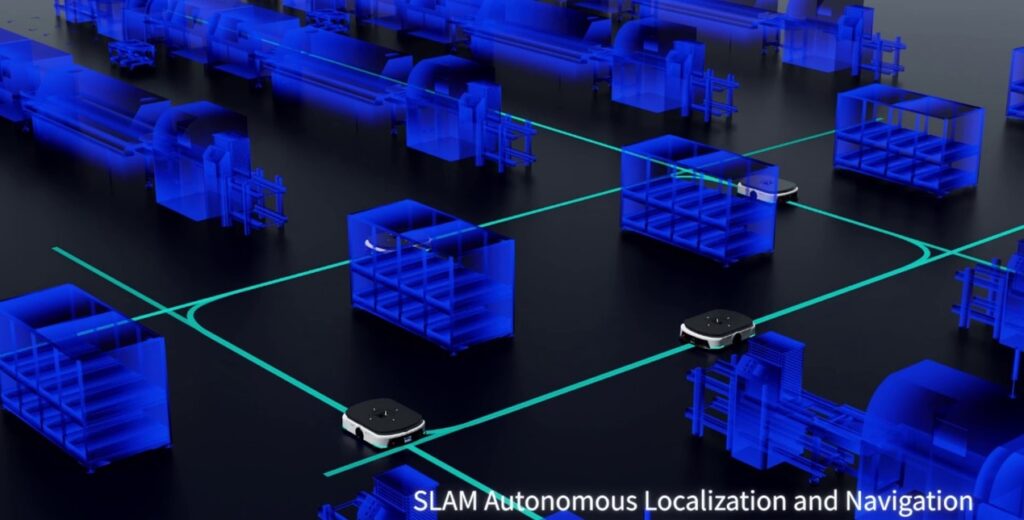
By using LiDAR, RGB-D cameras, and advanced algorithms, SLAM allows robots to dynamically create and update maps of their surroundings, navigate and avoid obstacles in real-time, and adapt to changes without requiring manual intervention.
Applications of SLAM-based navigation include autonomous warehouse robots that rearrange inventory dynamically and outdoor delivery robots adjusting paths to avoid pedestrians and vehicles.
Robots using SLAM Technology
While SLAM empowers robots with spatial awareness, 3D vision systems take this further by enhancing depth perception and semantic understanding. Traditional 2D vision systems, though useful for basic navigation and obstacle detection, fall short in complex scenarios. They face limitations such as reduced reliability in dynamic or cluttered environments, challenges in recognizing object shapes and orientations, and a lack of depth estimation capabilities.
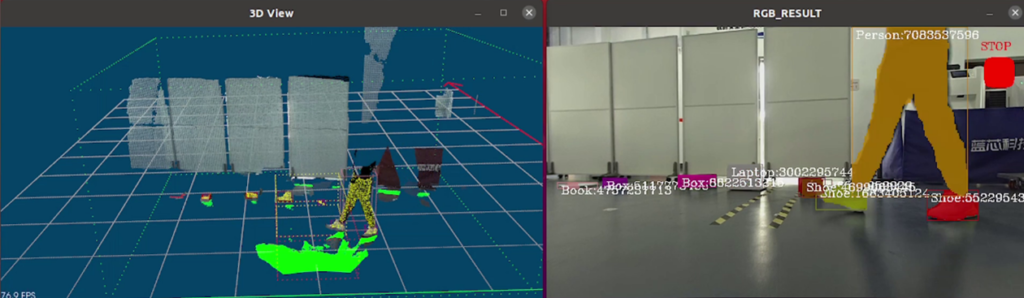
3D vision technologies, leveraging LiDAR, structured light, and depth cameras, address these shortcomings by providing precise spatial awareness through depth information, detailed object recognition for accurate manipulation and interaction, and enhanced obstacle avoidance in complex settings. For example, robots equipped with 3D vision can identify and grasp objects of varying shapes, sizes, and positions, a capability critical for warehouse automation and logistics.
Beyond perceiving their environment, 3D vision enables robots to achieve semantic understanding—interpreting the purpose and context of objects within their operational space. This allows robots to distinguish between movable objects and static obstacles, recognize pathways, furniture, and other elements in their environment, and adapt their actions based on context. Applications of semantic understanding include autonomous vehicles navigating traffic and identifying pedestrians and service robots understanding and interacting with household environments.
When markerless navigation and 3D vision converge, they create a powerful synergy. Robots become capable of autonomous mobility that is not only precise but also contextually intelligent. Whether it’s navigating a busy warehouse, delivering goods in urban environments, or assisting in healthcare settings, these technologies ensure that robots can operate seamlessly and effectively.
As SLAM and 3D vision continue to evolve, their applications will expand into new domains, driving innovation and redefining the possibilities for autonomous systems.