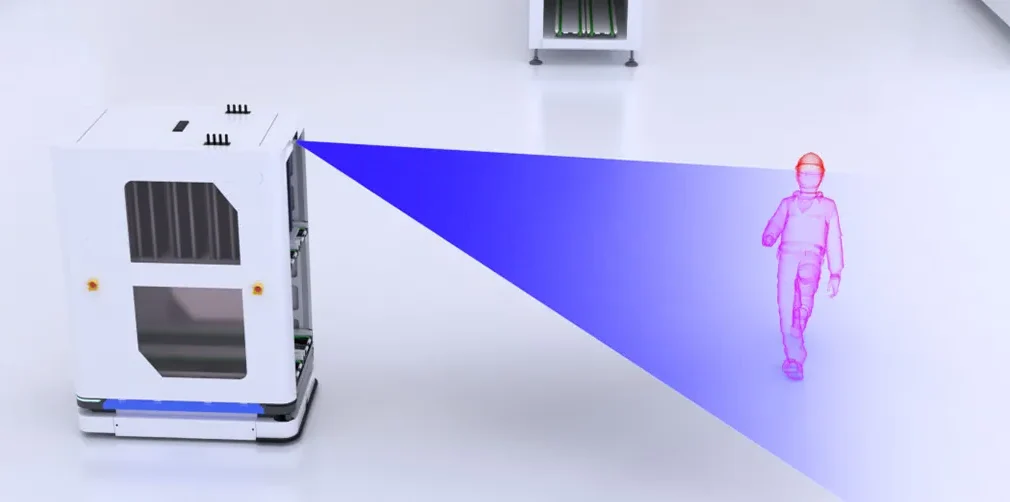
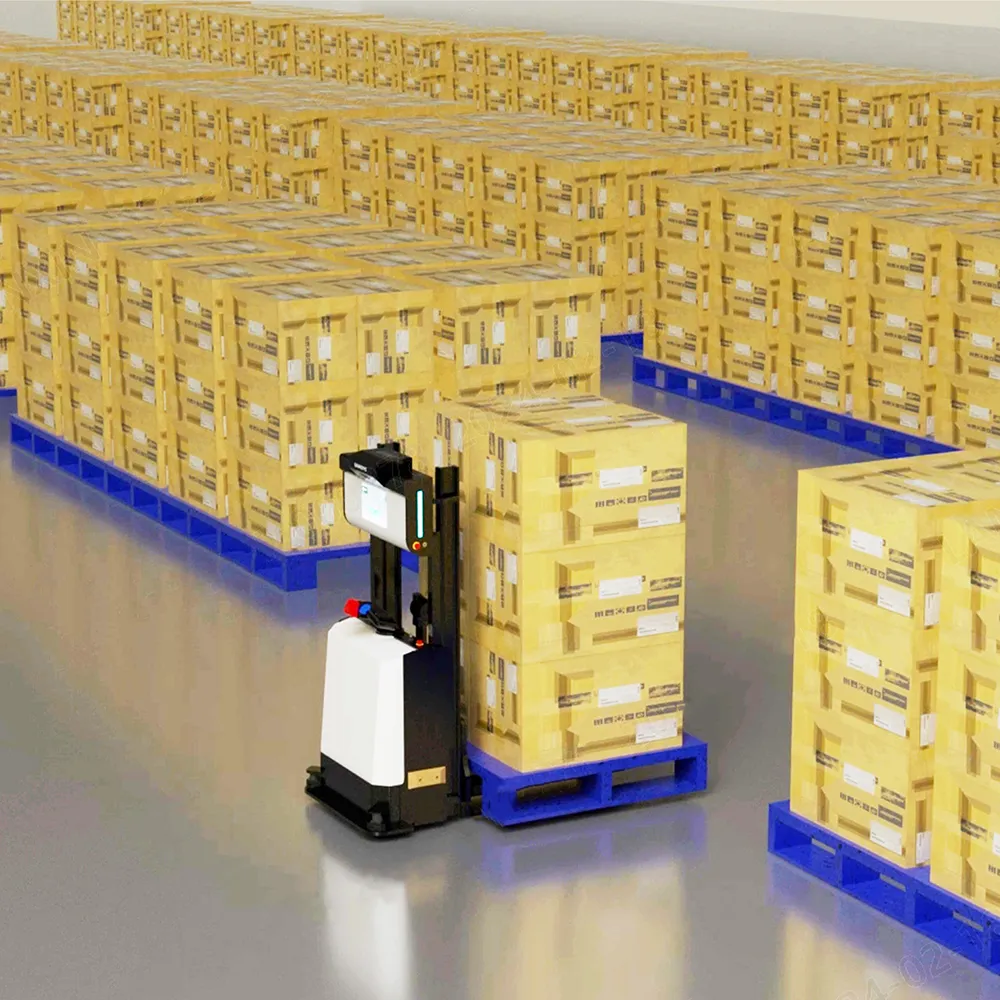
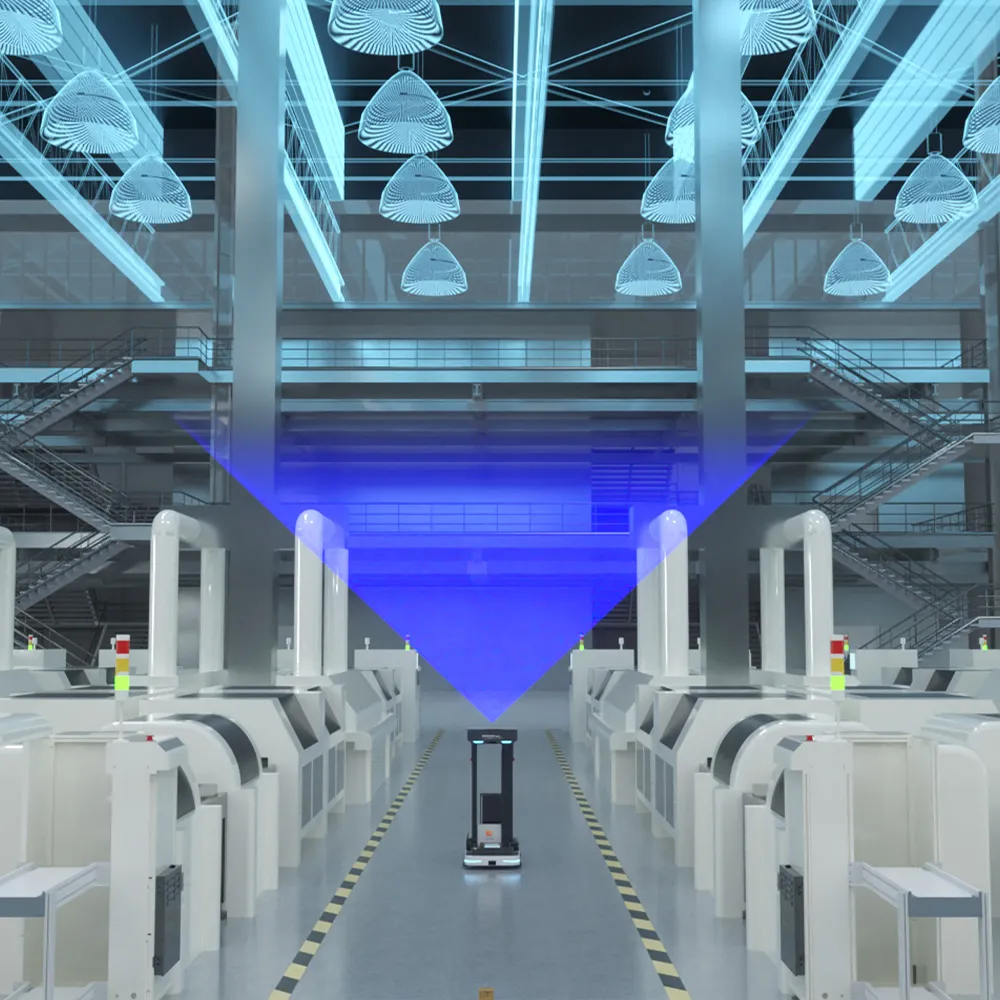
While both 3D cameras and 3D Lidars provide depth information crucial for AGV (Automated Guided Vehicle) and AMR (Autonomous Mobile Robot) navigation, they have different strengths and limitations. Generally, 3D Lidars offer a longer detection range, making them suitable for large environments and outdoor use, whereas 3D cameras have a shorter range, making them more suitable for indoor applications. Additionally, 3D Lidars are generally more expensive due to their advanced sensing capabilities, while 3D cameras are typically more affordable, providing a cost-effective solution for many applications.
A 3D camera can potentially replace a 3D Lidar for AGV/AMR navigation in environments where its limitations, such as range and lighting conditions, are not critical issues. For applications requiring detailed and long-range environmental mapping, 3D Lidars might still be preferred. The choice between a 3D camera and 3D Lidar should consider factors such as specific application requirements, environmental conditions, and budget constraints.